|
| |
|
|
|
| |
|
|
 |
Anche
questi rientrano nella categoria dei regolatori in serie, ma hanno
ovviamente un principio di funzionamento diverso dai lineari. Altre
denominazioni in uso per indicare questo tipo di regolatore sono: «alimentatore
tutto o niente»,
«chopper»,
«alimentatore
a commutazione»,
«alimentatore
a parzializzazione». Periodicamente una
definizione viene usata più delle altre a seconda della moda del momento,
ma tutte indicano lo stesso circuito. Per
capire il funzionamento di questo tipo di regolatore è opportuno osservare
la fig.1, che schematizza il funzionamento dell'alimentatore, studiando la
quale si arriva facilmente alla comprensione delle regole che sono alla base
del funzionamento dello switching. Supponiamo di aprire e chiudere
velocemente l'interruttore S1. Quando l'interruttore è chiuso, l'induttore
vede al suoi capi una tensione pari a Vin - Vout. La corrente dell'induttore
perciò crescerà secondo la formula:
Fig. 1 In
questo caso il diodo D1 è inattivo, in quanto risulta polarizzato
inversamente. Quando S1 viene aperto, la corrente che attraversa L1 cambia
segno, polarizzando direttamente D1 che diventa perciò conduttore. Da
questo continuo aprire e chiudere S1 deriva la formazione di un segnale ad
onda quadra ai capi di D1 (fig.2) il quale si comporta come un interruttore
con fase opposta a S1. Infatti quando S1 è chiuso, D1 non conduce (si
comporta perciò come un interruttore aperto); mentre quando S1 è aperto,
D1 conduce e si comporta come un interruttore chiuso. La funzione del
circuito LC (L1 e C1 di fig.1) è quella di filtrare tale tensione
alternata, livellandola intorno al suo valore medio. Chiaramente il valore
medio corrisponde a quello che noi abbiamo indicato con Vout e che può
essere calcolato con la formula:
Fig. 2 Fig. 3 In cui T indica la somma dei tempi in cui S1 é chiuso (Ton) e aperto (Toff), dando luogo a un periodo completo del segnale ad onda quadra (o impulsivo) presente ai capi di D1. Per maggiori chiarimenti circa Ton - Toff - T consultare la fig.2 e la fig.3. Dall'espressione precedente è facile comprendere come per poter controllare l'ampiezza della tensione Vout sia sufficiente agire sul tempo di chiusura (e conseguentemente anche su quello di apertura) dell'interruttore S1. Maggiore è il tempo di chiusura, rispetto a quello di apertura, maggiore è la tensione Vout. Passiamo ora allo schema a blocchi di fig. 4, comprendente le varie sezioni che formano un alimentatore a commutazione.
Vediamo adesso a grandi linee il funzionamento del circuito.
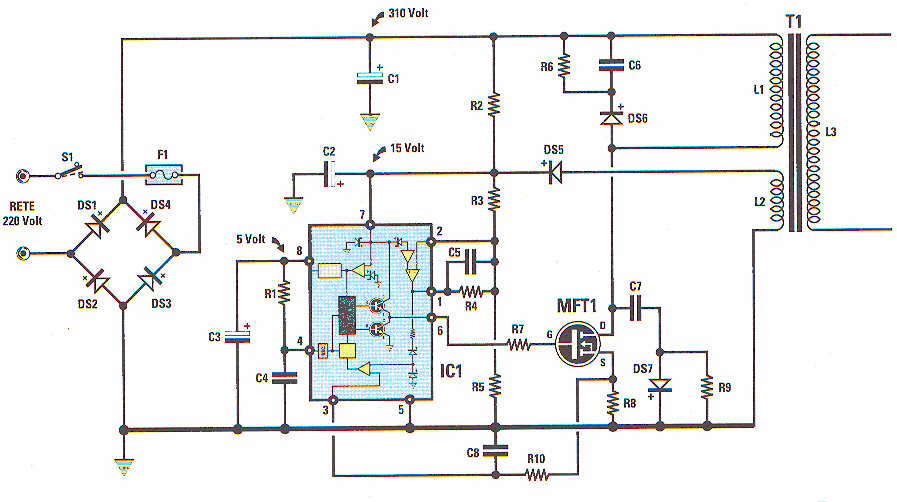
Fig. 7 Come potete notare la tensione dei 220 volt di rete,viene direttamente applicata al ponte di Graetz, normalmente costituito da diodi quali 1N4007 oppure,per assorbimenti superiori ad 1A di picco,dagli 1N5408:nel disegno non sono stati indicati i filtri LC che devono essere posti a monte del raddrizzatore per bloccare l'ingresso di armoniche o segnali spuri di cui è ricchissima la rete !!!La tensione pulsante dunque viene filtrata da C1, che deve obbligatoriamente, pena l'esplosione!!!,avere una tensione di lavoro non inferiore ai 380 volt.Ai capi di questultimo ci ritroviamo infatti la tensione di picco,pari cioè a circa 310 volt,che passando attraverso L1 arriverà al Drain del Mosfet MFT1.Al momento dell'accensione il resistore R2,detto tecnicamente RESISTORE DI START-UP,abbasserà la tensione da 310 a circa 15 volt con l'ausilio di uno zener integrato nell'UC3843 e filtrata dall'azione del capacitore C2, notare che la corrente di start-up sufficiente è di appena 1 mA.Immediatamente sul pin 6 avremo uno stato logico alto che porterà in saturazione il Mosfet,che aprendosi determinerà una corrente nell'avvolgimento L1. Il resistore R8 posto in serie ha la funzione di current-detect, ovvero causerà una caduta che verrà rilevata dal pin 3, facente capo ad un ingresso di un operazionale integrato nell'UC in configurazione di COMPARATORE,che superata la soglia di 1 volt commuterà lo stato logico del pin 6 da alto a basso,ottendo l'interdizione del Mosfet. In mancanza di corrente anche la caduta su R8 tornerà a 0 volt, causando una nuova commutazione dell'uscita,cioè del pin 6 da stato basso (0 volt) ad alto, riaprendo il Mosfet. Queste commutazioni (LEGGE DI LENZ),indurranno una tensione anche nell'avvolgimento L2,tecnicamente definito TERZIARIO,che attraverso DS5 porterà l'alimentazione all'UC, fungendo,tanto per fare un paragone con i relè, da autoritenuta, cioè autoalimenterà l'integrato impedendone il blocco !!! La frequenza di lavoro dell'oscillatore, variando la quale è possibile variare la tensione di uscita, viene definita dal valore di C4 e dalla resistenza di R1 applicati al pin 4.Il pin 8 eroga una tensione stabilizzata che serve ad alimentare R1 e garantire una certa STABILITA' IN TENSIONE,il tutto filtrato dal capacitore C3.I due resistori R3 ed R4 costituiscono un partitore di tensione che compone la rete resistiva di controreazione dell'operazionale interno utilizzato come amplificatore di errore.Il pin 2 fa capo all'ingresso non invertente, mentre il pin 1 all'uscita:questa sezione peggiora la stabilità in tensione, ma permette di migliorare la risposta dinamica dell'alimentatore.
|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|